




Taybetmendî
• Avahiya temam a bi pola hatiye qalibkirin, bi hêz û hişkbûna têrker;
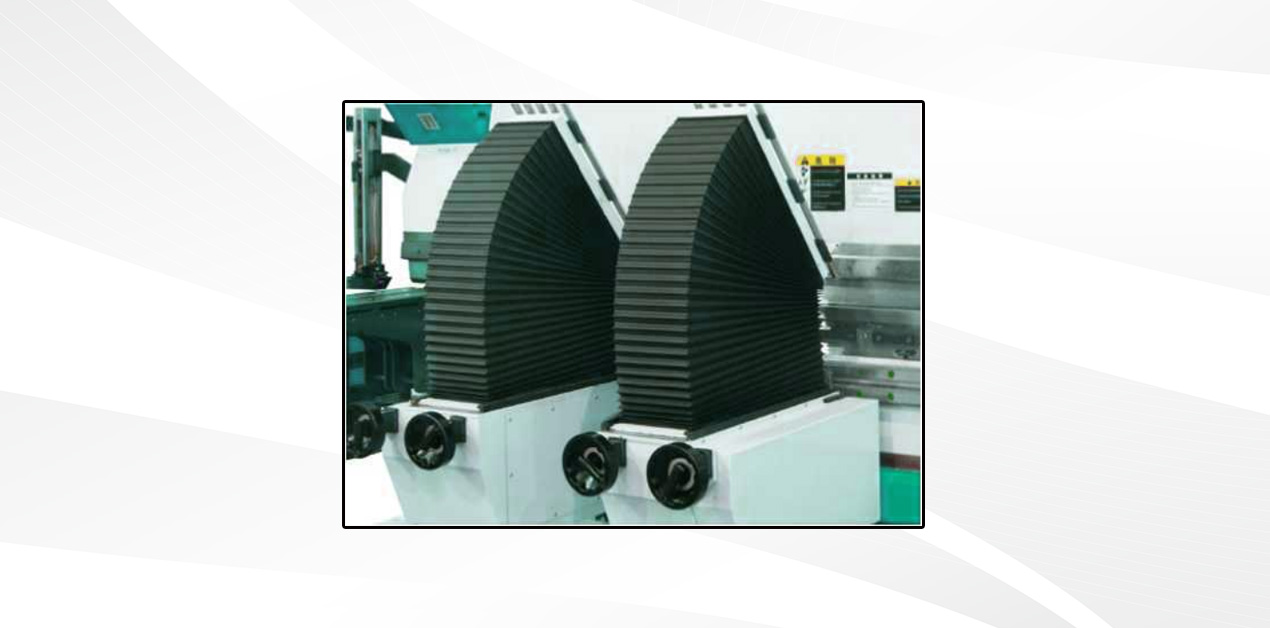
• Avahiya hîdrolîk a daketina ber bi jêr, pêbawer û nerm;
• Yekîneya rawestandina mekanîkî, torka senkronîk, û rastbûna bilind;
• Paşpîvan mekanîzmaya paşpîvanê ya pêça T-type bi çîpek nerm, ku ji hêla motorekê ve tê ajotin, qebûl dike;
• Amûra jorîn bi mekanîzmaya tezmînata tansiyonê, Ji bo garantîkirina rastbûna bilind a xwarbûnê
Sîstema CNC
-1. kt15-a nû ya kompakt çareseriyek kontrola destikê ya bêkêmasî ya herî pêşketî ji bo firênên pêvekirî yên senkronîzekirî zêde dike. Bernamekirina CNC-ya herî hêsan li ser bingeha navrûya bikarhêner a ekrana destikê ya grafîkî ya Delem pêşkêş dike.2. Ev kontrola li ser panelê, ku standard dikare heta 4 teweran kontrol bike, dikare di kabîneyan de were entegre kirin û her weha di xaniyek milê daliqandî ya vebijarkî de were bikar anîn.3. Ekrana fireh a 10.1" TFT-ya rengîn a çareseriya bilind, bi teknolojiya pir-destikê ya asta pîşesaziyê, gihîştina navrûya bikarhêner a Delem-ê ya îsbatkirî dide.
4. Bi rêzeyeke xebatê ya bername-ber-hilberînê ya bilez û hêsan, verastkirina makîneyê û ceribandina xwarbûnên wê digihîjin asta herî kêm.y.


Kelepçeya Bilez a Amûra Jorîn
· Amûra kelepçekirina amûra jorîn kelepçeka bilez e
Girêdana Qalibê Bingehîn a Pir-V (vebijarkî)
· Qaliba jêrîn a pir-V bi vebûnên cûda


Pîvana paş
· Rêbernameya pêç / lînerê topê rastbûnek bilind e
Piştgiriya Pêşiyê
· Platforma materyalê ya alloyûma aluminiumê, xuyangek balkêş,
Û zirara kar kêm bike.


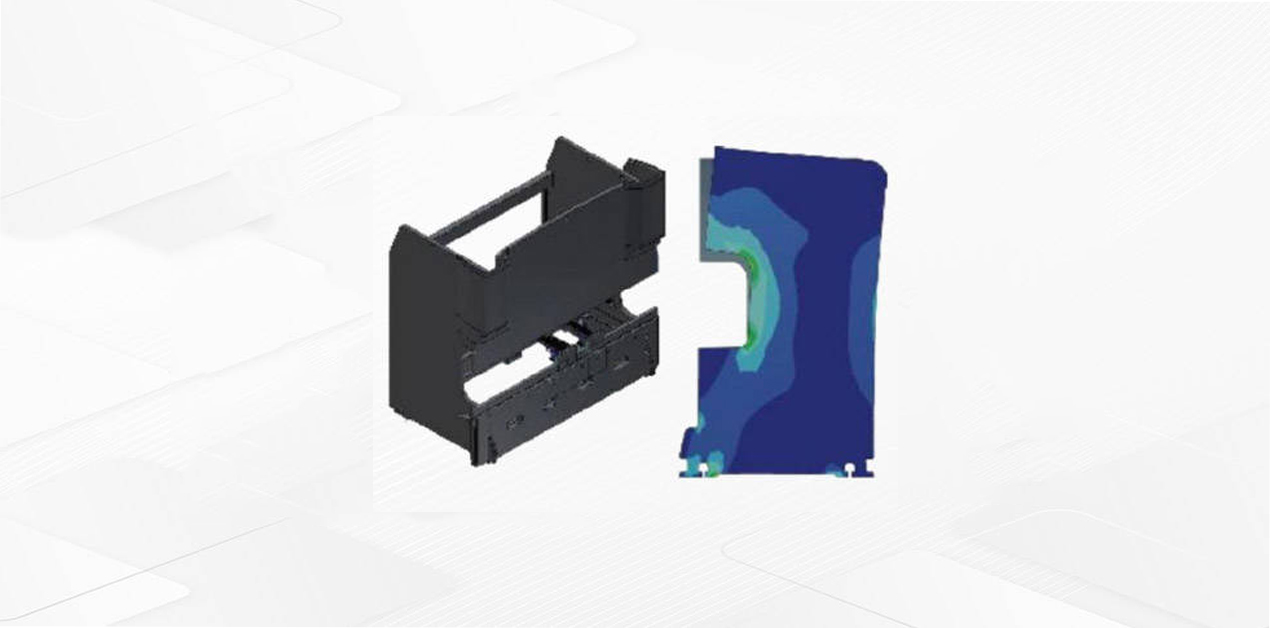
Tezmînata Tacgirtinê ya Vebijarkî ji bo Maseya Kar
· Qiloçek konveks ji komek qirloçên oblîk ên konveks pêk tê ku rûyek wan a xwar heye. Her qirloçek derketî li gorî xêza xwarbûnê û maseya xebatê bi analîza hêmanên dawîn ve tê sêwirandin.
· Sîstema kontrolkera CNC li gorî hêza barkirinê mîqdara tezmînata pêwîst hesab dike. Ev hêz dibe sedema xwarbûn û deformasyona plakayên vertîkal ên slayt û maseyê. Û tevgera nisbî ya qiloçê konveks bixweber kontrol dike, da ku bi bandor deformasyona xwarbûnê ya ji hêla slayt û raserê maseyê ve çêdibe tezmîn bike, û perçeya xebatê ya xwarbûnê ya îdeal bi dest bixe.
Guhertina Bilez a Qaliba Bingehîn
· Ji bo qalibê jêrîn kelepçeya guhertina bilez a 2-v qebûl bikin

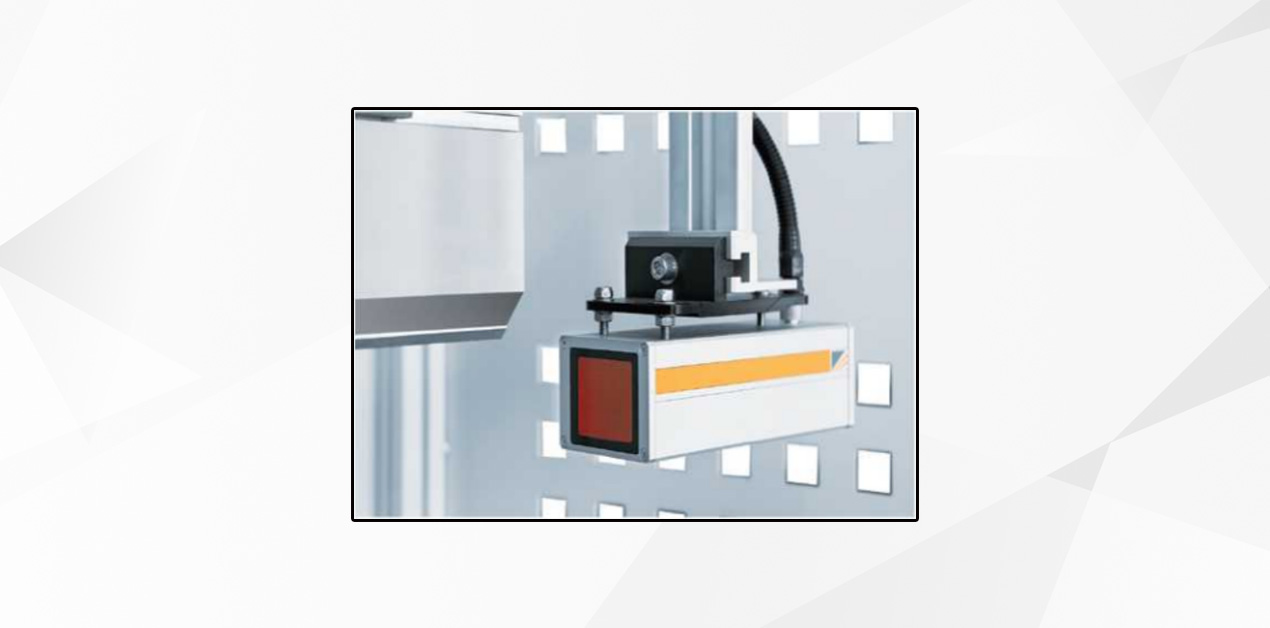
Parêzvanê Ewlehiyê yê Lasersafe
· Parêzvanê ewlehiyê yê Lasersafe PSC-OHS, ragihandin di navbera kontrolkera CNC û modula kontrola ewlehiyê de
· Tîrêjên dualî ji parastinê xala li jêr 4 mm li binê serê amûra jorîn in, da ku tiliyên operator biparêzin; sê herêm (pêş, navîn û rastîn) yên leaser dikarin bi nermî werin girtin, da ku pêvajoya xwarbûna qutiya tevlihev misoger bikin; xala bêdengkirinê 6 mm ye, da ku hilberîna bi bandor û ewle pêk were.
Alîkariya Bendkirina Servo ya Mekanîkî
· Dema ku plakaya piştgiriyê ya xêzkirina nîşanê dikare fonksiyona zivirandina jêrîn pêk bîne. Goşeya jêrîn û leza ji hêla kontrolkera CNC ve têne hesibandin û kontrol kirin, li ser rêberê xêzik çep û rastê diçin.
· Bilindahîyê jor û jêr bi destan verast bike, pêş û paş jî dikarin bi destan werin verast kirin da ku ji bo vebûna cûda ya qalibê jêrîn guncan be
· Platforma piştgirîyê dikare ji firçe an lûleya pola zengarnegir be, li gorî mezinahiya perçeya kar, tevgera girêdana du piştgirî an tevgera cuda dikare were hilbijartin.
Parametreyên Teknîkî yên Sereke
| Modela makîneyê | WE67K-63T/1600 | |
| Zexta Nominal | 630 kN | |
| Dirêjahiya xwarbûnê | 1600mm | |
| Dûrahiya di navbera stûnan de | 920 mm | |
| Kûrahiya qirikê | 230 mm | |
| Zexta herî zêde ya sîstemê | 22Mpa | |
| Rewşa xebitandina slaytê | rêwîtiya tevgerê/lêdana | 200mm |
| leza daketinê ya bilez | 180mm/s | |
| leza vegerê | 110mm/s | |
| leza xebatê | 10mm/s | |
| Rastbûna şemitandinê | Rastbûna pozîsyonê | ±0.03mm |
| Rastbûna pozîsyona dubarekirinê | ±0.02mm | |
| Hêza motora sereke | Erk | 7.5 KW |
| leza zivirandinê | 1440r/min | |
| Sîstemê bixebitîne | Cins | KT15 |
| Pompa Petrolê | Cins | Çîn kalîteya bilind |
| Rastbûna xwarbûnê | qozî | ±30 |
| rastbûn | ±0.7mm/m | |
| Woltî | 220/380/420660V | |

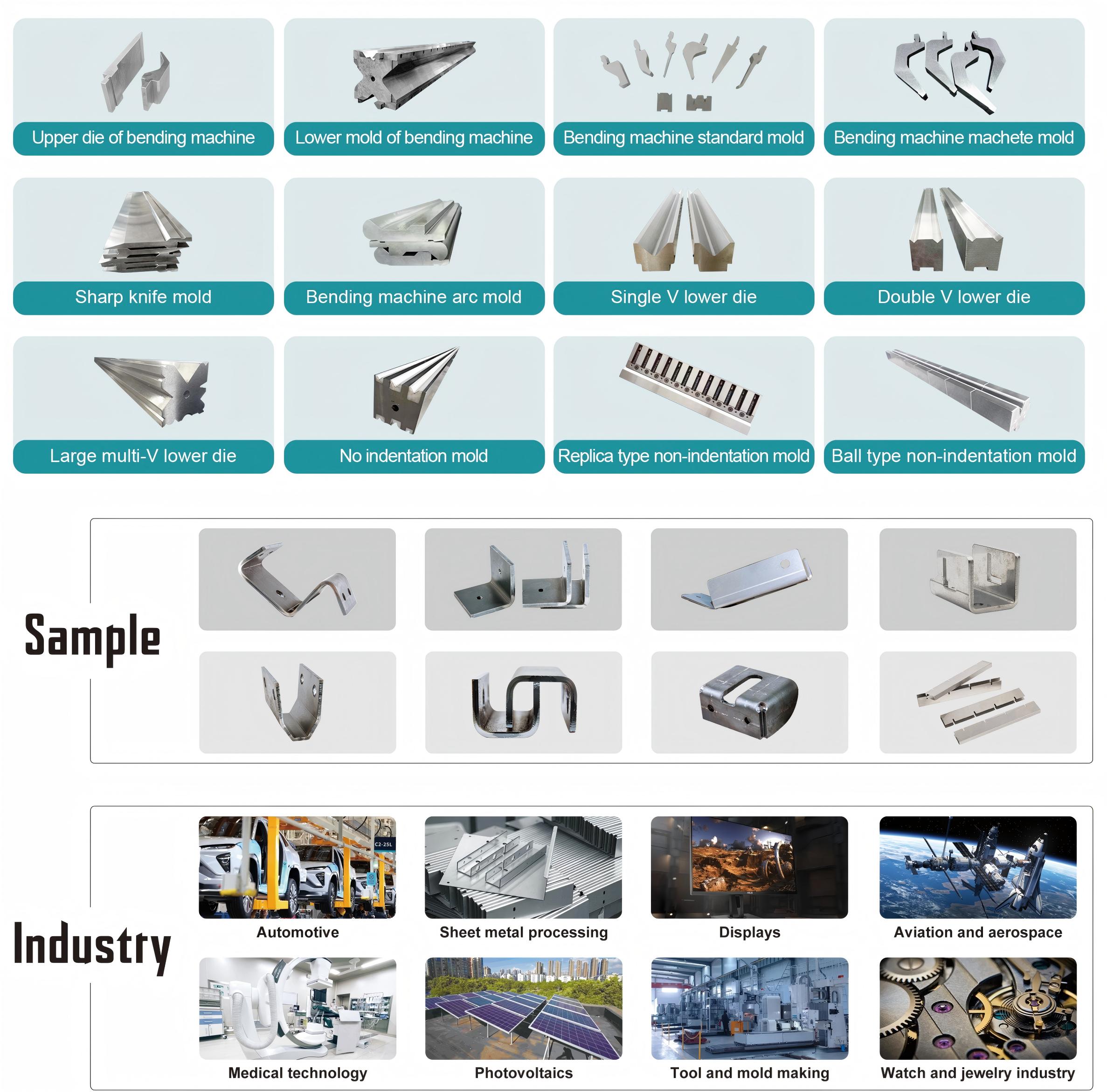
Nimûne
Pakkirin

Karxane

Xizmeta me
Serdana Xerîdar

Çalakiya Offline

Pirsên Pir tên Pirsîn
Q: Ma belgeya CE û belgeyên din ji bo paqijkirina gumrikê li cem we heye?
A: Erê, me CE heye, karûbarek yek-rawestî pêşkêşî we dike.
Di destpêkê de em ê nîşanî we bidin û piştî barkirinê em ê CE/Lîsteya Pakkirinê/Fatûreya Bazirganî/Peymana firotanê ji bo paqijkirina gumrikê bidin we.
A: Ma hûn dikarin materyalên xwe ji min re bibêjin: cs an ss û stûriya wan? Û firehiya herî mezin a xwarbûnê? Wê hingê ez ê modela makîneyê ji bo we piştrast bikim.
-

WE67K-135T4100 Bendkirina CNC ya Hîdrolîk a Kalîteya Bilind...
-

LX-350T-1250 Makîneya Bendingê ya Elektrîkî ya Tevahî ...
-

WG67k-40T1600 Metalê bi karîgeriya bilind a erzan ...
-

LX-1030 CNC Pola Plate Sheet Metal Hemû-Elektrîkî ...
-

WC67K-125T4000 Makîneya Bendingê ya CNC ya herî erzan Sol...
-

LX-6020 Gerdûnî ya Karîgeriya Bilind Hemû-Elektrîkî ...











